Pour répondre à cette question, voyons d’abord son utilité. Près des côtes, le navigateur dispose de nombreuses informations lui permettant de déterminer sa position : des phares, des « amers » (c’est-à-dire des points facilement réparables sur la côté : clochers, pylônes, monuments, etc.), etc.
Au large au contraire, rien de tout cela. Il n’y a que le ciel, l’horizon, les astres (Soleil, planètes, étoiles). Comment les utiliser pour calculer sa position ? D’autant que les informations données sont très succinctes : seulement l’azimut (angle entre le Nord, l’observateur et l’astre) et la hauteur au-dessus de l’horizon (angle entre l’horizon et l’astre, vu de l’observateur).
Tout d’abord, tordons le cou à une première idée, il est impossible de calculer sa position à partir de la hauteur d’un astre. Pourquoi ?
Etudions le principe utilisé, avec les navigateurs-timoniers, c’est-à-dire les marins qui sont chargés de la conduite nautique, depuis la « passerelle » (d’où est dirigé le navire) :
Comme pour toutes les constructions de points en navigation, nous avons besoin de trois éléments : trois amers en navigation optique, trois satellites en navigation GPS, trois astres en navigation astronomique.
 Nous allons utiliser pour nous positionner un principe géométrique très simple. En posant un cône sur une sphère, nous définissons un cercle à la surface de la sphère. Et partout sur ce cercle, nous verrons le sommet du cône sous le même angle.
Nous allons utiliser pour nous positionner un principe géométrique très simple. En posant un cône sur une sphère, nous définissons un cercle à la surface de la sphère. Et partout sur ce cercle, nous verrons le sommet du cône sous le même angle.
En observant trois astres, nous obtenons trois cercles et nous nous trouvons forcément à l’intersection de ces trois cercles.
Ces cercles s’appellent cercles de hauteur. Ces cercles ont des rayons très grands, souvent de plus milliers de nautiques (1 « nautique », ou mille nautique = 1852 mètres).
À l’échelle humaine, il est donc difficile de percevoir leurs courbures. Aussi est-il plus simple de les représenter sous forme de droites sur des distances très courtes : on parle alors de « droites de hauteur ».
Là où le calcul se complique, c’est pour la détermination de leurs coordonnées géographiques. Ils contiennent chacun une infinité de points qu’il faut comparer entre eux pour trouver un point commun. Monstrueux. D’ailleurs ce calcul n’est possible que depuis très peu de temps grâce à des calculateurs surpuissants. Il est donc impossible de calculer sa position grâce aux astres avec « les moyens du bord »
Nous allons procéder différemment.
Entretenons notre position « estimée », c'est-à-dire calculons notre position à partir du dernier point solidement déterminé à proximité des côtes. Cette position calculée sera légèrement différente de notre vraie position en raison des éléments de dérive qui nous écartent de notre route. Ils sont dus aux vents et aux courants. Le fin navigateur essayera de deviner cette dérive, par calculs, observation, connaissance de son navire. Mais plus le temps passe, plus notre calcul devient sujet à caution. Il faut « recaler notre estime ».
Nous allons dans un premier temps considérer que notre calcul n’est pas si mauvais que cela et que notre position estimée n’est pas trop éloignée de notre position vraie.
C’est à ce moment que nous sortons nos sextants pour mesurer l’angle entre nous, observateur, l’horizon et un astre pour obtenir sa « hauteur vraie ». Dans le même temps, nous sommes capables, grâce aux données des Ephémérides nautiques, document du Bureau des Longitudes, de calculer la hauteur théorique de l’astre, celle qu’il aurait si nous étions vraiment à notre position estimée au moment de l’observation.
Notons que notre opération nécessite une très grande maîtrise de la mesure du temps. C’est d’ailleurs la raison pour laquelle les navigateurs ont attendus des siècles avant de pouvoir faire ce genre de calcul.
Ce calcul de trigonométrie sphérique a fait transpirer, et continue à le faire, des générations d’élèves de l’Ecole Navale et de l’Hydro.

Pour faire simple, cette formule est la résolution d’un triangle sphérique dont les sommets sont l’astre, le pôle élevé (Nord ou Sud) et le zénith de l’observateur et dont les cotés sont la distance zénithale, la colatitude et la distance polaire.
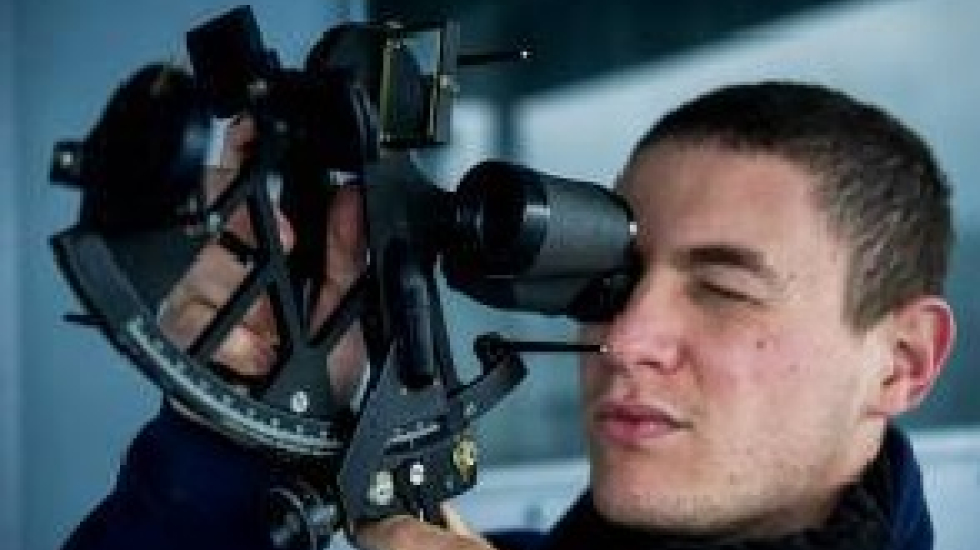
 Un sextant est un appareil optique qui permet de mesurer l’angle entre un observateur, l’horizon et un astre. Il fonctionne par superposition d’images en visée directe et en visée réfléchie par un jeu de miroir. Il s’appelle sextant car son limbe mesure 60°, soit la sixième partie d’un cercle.
Un sextant est un appareil optique qui permet de mesurer l’angle entre un observateur, l’horizon et un astre. Il fonctionne par superposition d’images en visée directe et en visée réfléchie par un jeu de miroir. Il s’appelle sextant car son limbe mesure 60°, soit la sixième partie d’un cercle.
En calculant la hauteur estimée de l’astre, nous avons créé un cercle de hauteur sur lequel nous supposons être. En réalité, notre position se trouve sur le cercle de hauteur observé, quelque part en relative proximité du point le plus proche. La comparaison évoquée plus haut est une simple soustraction des hauteurs vraies et estimée dont le résultat donne directement la distance en mille nautique séparant les deux cercles.
Répétons l’opération trois fois, soit sur des astres différents, planètes, étoiles, soit sur le Soleil. Dans ce cas, nous devrons attendre que celui-ci se trouve à des positions différentes pour « simuler » des astres distincts.

Au final, nous ne calculerons pas de position en latitude/longitude, nous recalerons notre position estimée en raison de son décalage avec l’intersection des droites de hauteurs. En effet, nous allons construire un repère dont le centre est la position estimée. Nous portons, pour chaque astre observé, la « droite de hauteur » tracé par rapport à l’origine du point estimé. L’intersection des 3 droites donne la position réelle.
Il ne nous reste plus qu’à « recaler » la position estimée sur cette position réelle : c’est qu’on appelle « le recalage de l’estime ».
La précision obtenue par un observateur entraîné est de l’ordre de 300 mètres. Beaucoup si on la compare à la redoutable efficacité du GPS mais suffisante sur une carte à petite échelle. Rappelons enfin que vous devez disposer d’une montre ayant une erreur inférieure à une demie seconde en Temps Universel Coordonné. Cependant, une telle pratique est-elle envisageable sous les hautes latitudes ? Nous en parlerons dans un prochain article.
En attendant, à vos sextants…