Sous l'eau, des robots chassent en meute
Actualité
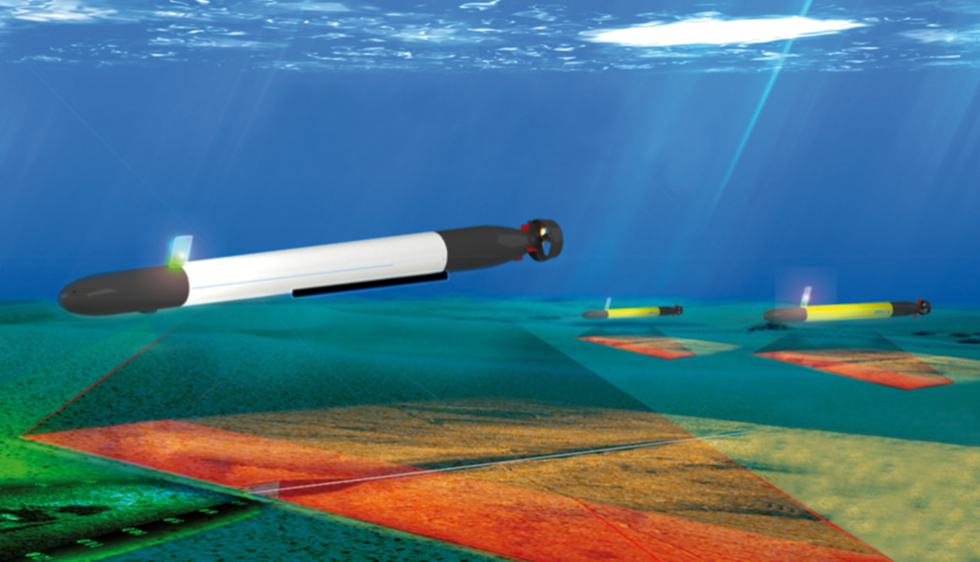





Autonomes et parfaitement coordonnés, des robots sous-marins forment des patrouilles d’un genre nouveau.
Surveiller le fonctionnement d’une hydrolienne. Inspecter un câble électrique sous-marin. Ces missions, confiées aujourd’hui à des plongeurs, pourraient, demain, être réalisées par des robots. Le projet Comet, porté par la société Neotek (Lorient) et l’École nationale supérieure des techniques avancées (Ensta) de Bretagne, cherche à développer des véhicules sous-marins autonomes (AUV(1)) capables de fonctionner de manière coordonnée.
Lutter contre la dérive
Lors de la Sea Tech Week, qui s’est déroulée du 8 au 12 octobre à Brest, le public a pu observer une démonstration de l’un de ces automates dans un bassin. Après avoir patrouillé pour reconnaître son environnement, l’AUV détecte immédiatement un objet introduit dans l’eau, et entame ensuite la poursuite de ce dernier. « Le robot connaît sa position par GPS avant d’être immergé. Quand il plonge, il va mettre à jour ses données en utilisant son système de navigation inertielle. Mais avec le temps, les dérives de ce système provoquent un accroissement de l’incertitude sur sa position », explique Benoît Zerr, de l’Ensta Bretagne. Comment se repérer en mer, où les courants entraînent une dérive ? En “chassant” à plusieurs. Organisés en “meute”, les AUV peuvent se localiser par triangulation. Luc Jaulin, chercheur en robotique à l’Ensta, met au point des calculs “ensemblistes”, basés sur des équations dont les variables sont remplacées par des intervalles : le robot ne connaît pas précisément sa position, mais sait que celle-ci se trouve dans un espace à trois dimensions délimité par des intervalles en latitude, longitude et profondeur. « Les AUV doivent pouvoir communiquer entre eux de manière sécurisée, par des signes optiques en bassin ou acoustiques, plus commodes en mer en raison des distances et de la turbidité de l’eau », souligne Benoît Zerr.
Dans le sillage d’un leader
Pour parvenir à une coordination optimale des automates, les scientifiques de l’Ensta s’appuient sur l’expertise de Télécom Bretagne (système de transmission acoustique), Neotek (conception du robot porteur), ZTI (mise au point d’une horloge de très grande précision) et Williamson Electronique (conception d’une pile adaptée au milieu marin). « L’aspect innovant du projet vient de la capacité du robot sous-marin à travailler de manière coopérative et collaborative avec d’autres robots », souligne Julien Lamour, de Neotek. Comme certains bancs de poissons parcourant de longues distances, les AUV pourraient se positionner dans le sillage d’un leader, régulièrement remplacé afin d’économiser leur énergie. La perte ou la panne d’un AUV n’interrompra pas la mission, grâce à la coordination en temps réel de la meute. Contrairement aux AUV actuels, très lourds parce que conçus pour effectuer une multitude de tâches, ces robots “poissons” seront monofonctions, donc beaucoup plus légers : tel robot sera doté d’un capteur d’obstacle, tel autre d’une caméra... Le budget de Comet atteint 2,9 millions d’euros(2). Les premières meutes de robots devraient être déployées d’ici à un ou deux ans.
(1)AUV : Autonomous Underwater Vehicule.
(2)660000 euros sont issus du Fonds unique interministériel (FUI), qui couvre 100 % de la partie recherche du projet labellisé par le pôle Mer Bretagne, et 1 million d’euros est versé par les Régions Bretagne et Pays de la Loire, le département du Morbihan et les communautés d’agglomérations de Lannion et de Lorient. Le reste est financé par les fonds propres des partenaires industriels.
Benoît Zerr Tél. 02 98 34 88 13
Benoit.zerr [at] ensta-bretagne.fr (Benoit[dot]zerr[at]ensta-bretagne[dot]fr)
Julien Lamour Tél. 02 97 89 87 25
julien.lamour [at] neotek-web.com (julien[dot]lamour[at]neotek-web[dot]com)
TOUTES LES ACTUALITÉS
du magazine Sciences Ouest