Un fauteuil qui a les yeux en face des roues
Actualité
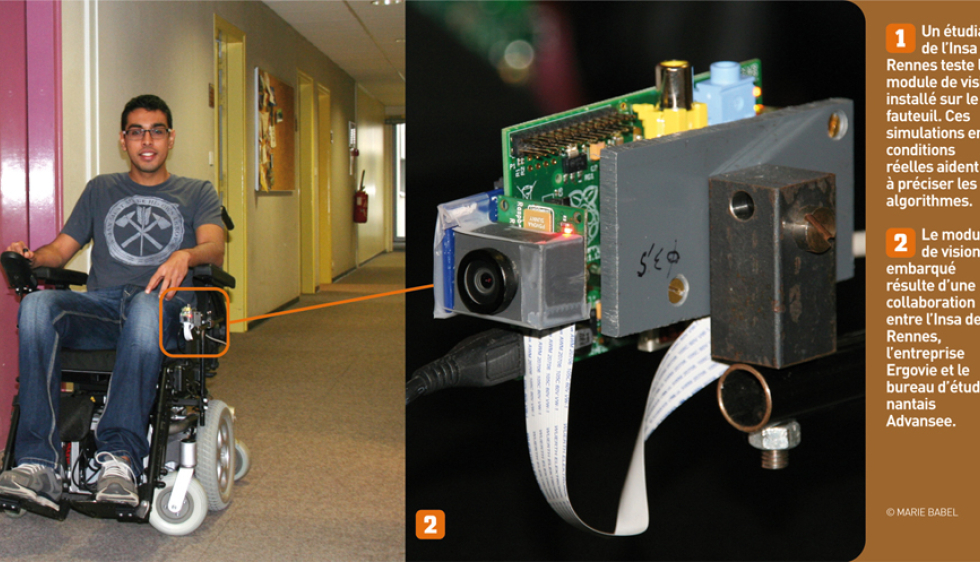





Des chercheurs de l’Irisa mettent au point un fauteuil roulant doté de caméras qui corrigent et précisent la trajectoire via un module robotisé.
Ici, on met au point un bras articulé pour capturer les satellites débris de l’espace. Là, une troisième main est destinée à aider le chirurgien à compenser le mouvement respiratoire d’un patient pendant une opération. Dans l’équipe de recherche Lagadic(1) (petit œil, en breton), la robotique a des yeux et va bon train. « L’idée au cœur de nos recherches(2) est de piloter un robot à partir d’une image quelle qu’elle soit : échographie, photographie issue d’une webcam... », explique Marie Babel, enseignant-chercheur à l’Insa-Irisa. Avec François Pasteau, ingénieur expert de l’Insa de Rennes, ils travaillent sur un fauteuil roulant intelligent, en collaboration avec l’entreprise Ergovie, qui répond aux besoins des personnes âgées ou ayant un lourd handicap. Ergovie adapte des fauteuils roulants, commercialise et assure la maintenance de 1800 modèles différents.
Des yeux pour rouler droit
« On s’est rendu compte avec Ergovie qu’il y avait un manque en termes d’assistance au pilotage. Passer une porte sans se cogner dans l’embrasure, j’ai essayé, c’est compliqué même pour une personne valide, souligne Marie Babel. Plus généralement, de nombreux contextes du quotidien sollicitent une grande concentration pour se déplacer. C’est épuisant ! » L’objectif du projet des deux spécialistes, nommé Apash(3), est donc d’imaginer un module robotisé semi-autonome, adaptable à un fauteuil du commerce, qui assure la sécurité de l’utilisateur dans les zones délicates et qui limite la fatigue. « Nous nous sommes focalisés sur le passage des portes et la circulation dans les couloirs », précise François Pasteau. Le fauteuil, dédié à une utilisation intérieure, possède deux roues motrices sous l’assise, et quatre roues folles, comme celles que l’on trouve sous les caddies de supermarchés. « Il a deux façons de se mouvoir : la translation avant/arrière et la rotation sur lui-même. On a beau être précis à l’utilisation du joystick, l’appareil fait facilement des zigzags. »
Afin de garder un coût raisonnable de fabrication, l’équipe a opté pour des caméras classiques. « À terme, il y en aura une de chaque côté à l’avant et une derrière. » Pourquoi une caméra à l’arrière ? Parce qu’en entrant en marche avant dans un ascenseur, on sort forcément en marche arrière !
Une fois l’information visuelle acquise (orientation du fauteuil et position latérale), un algorithme la traite afin de modifier la trajectoire via une loi de commande. Ainsi, plus le fauteuil s’approche d’un mur, plus la correction est forte. « Cette loi doit être robuste, c’est-à-dire qu’elle doit rester stable même si les données reçues ne le sont pas. Par exemple, elle doit savoir s’adapter à une caméra qui tremble ou qui vient d’être bousculée. » Si le système est trop figé, le robot n’est plus utilisable dans les conditions réelles. « Cette question fait l’objet de nos tests actuels. On aimerait terminer cette phase fin novembre. »
Une autonomie conservée
Le projet a commencé il y a un an et demi et s’achèvera en septembre 2014. Comme tout véhicule en partie automatisé, qui transporte une personne, le fauteuil devra subir des tests pour obtenir une habilitation légale.
« L’utilisateur doit pouvoir rester maître de son véhicule, même si l’algorithme plante ou si un câble se débranche », précise Marie Babel. Le contrôle humain de l’appareil n’est pas qu’une question technique. L’éthique entre aussi en jeu : « Les personnes handicapées sont libres d’utiliser ou non ce type de fauteuils, mais nous nous sommes quand même demandés si nous étions en droit de corriger leurs trajectoires. Elles peuvent donc désactiver le module si elles le souhaitent. »
Les besoins en matière d’assistance au pilotage sont très importants. Suivre un trottoir sans trébucher, émettre un son de sécurité lors de la marche arrière, éviter de couper la route d’un passant au milieu d’un groupe... Autant de challenges que la robotique va relever dans un futur très proche !
Améliorer la vie sociale
Comment se frayer un chemin en fauteuil roulant dans un lieu très fréquenté ? Comment éviter de rouler entre deux personnes en pleine conversation ? Les algorithmes du module de vision embarqué pourraient intégrer des contraintes liées aux conventions sociales. Cette problématique fait actuellement l’objet d’une action d’envergure menée par l’Inria qui rassemble neuf équipes-projets des centres de Nancy, Grenoble, Sophia Antipolis, et Rennes en une entité transversale appelée Pal (Personally Assisted Living).
(1)Lagadic regroupe des chercheurs de l’Irisa (Institut de recherche en informatique et systèmes aléatoires, UMR CNRS 6074, Insa de Rennes, Université de Rennes 1) et de Inria (Institut national de recherche en informatique et en automatique), à Rennes.
(2)Lire Sciences Ouest n° 198 - avril 2003. www.espace-sciences.org/archives/science/16142.html
(3)Apash : Assistance au pilotage pour l’autonomie et la sécurité des personnes handicapées.
Marie Babel Tél. 02 99 84 71 07
marie.babel [at] irisa.fr (marie[dot]babel[at]irisa[dot]fr)
François Pasteau Tél. 02 99 84 74 88
francois.pasteau [at] irisa.fr (francois[dot]pasteau[at]irisa[dot]fr)
TOUTES LES ACTUALITÉS
du magazine Sciences Ouest